




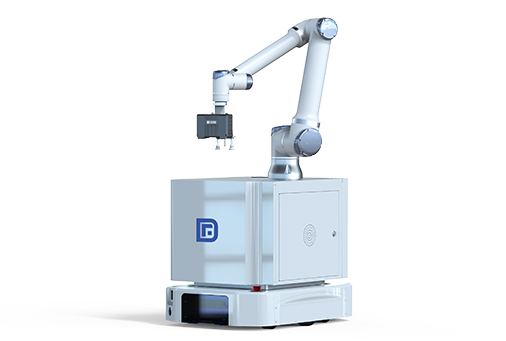
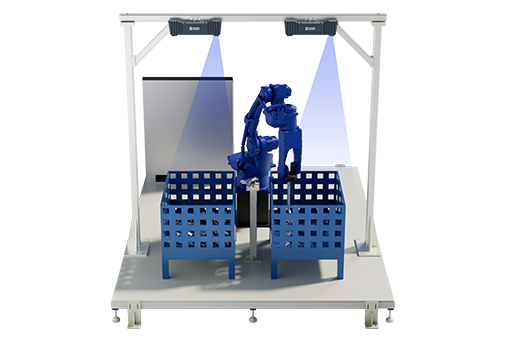
Vision-Guided Unordered Grasping for Nut Welding



Please fill out the form below. Our expert advisor will contact you shortly!

In automatic nut welding equipment, most of the nut loading, positioning, and welding processes are carried out manually—either by holding the nuts by hand or placing them into positioning fixtures manually. This results in low overall welding efficiency and high production costs. Leveraging the DexVerse™ engine, DexForce's spatial and embodied intelligence suite guides robots to orderly grasp and place four specifications of welded parts on the loading station, and accurately place workpieces at designated locations to complete the loading and unloading tasks.
⦁ Wide variety of workpieces complicates production scaling.
⦁ Manual loading is inefficient and struggles to ensure consistent quality.


Sim2Real Model Training

Precise Positioning


Higher-Precision 3D Imaging Capability

Integrated Imaging and Perception

Applicable to Challenging Industrial Scenes

Algorithm Development for Extreme Working Conditions
Contact Us
Headquarters: 14th Floor, Shenzhen Innovation Investment Mansion, No. 1001 Keyuan Road, Nanshan District, Shenzhen City, Guangdong Province, China
Official Hotline: (+86) 4008086299
Official Email: contact@dexforce.com
Career: HR@dexforce.top
Investment: ir@dexforce.com









Copyright © 2025 DexForce Technology Co., Ltd. Guangdong ICP License No. 20058782-4

