




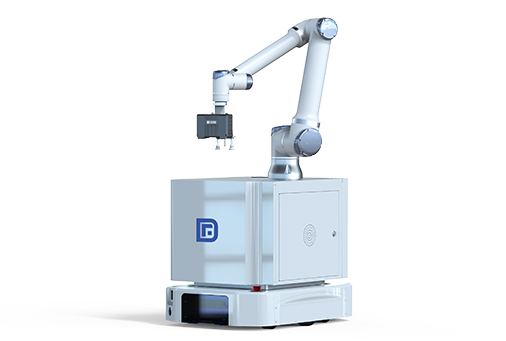

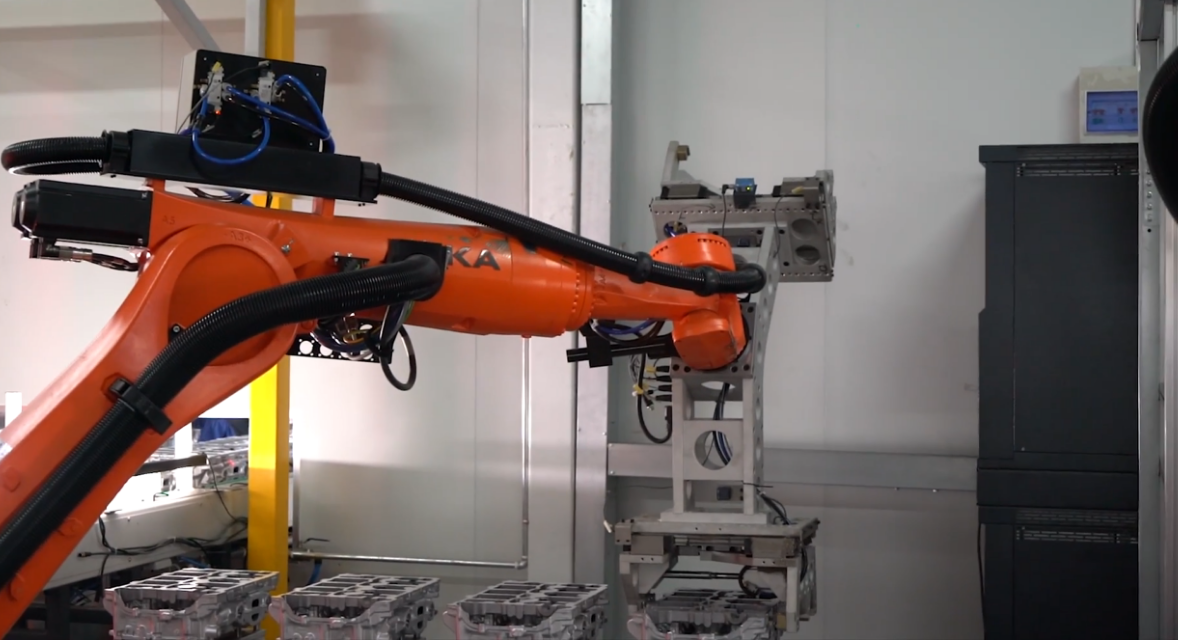
Mobile Manipulator Workstation
Integrates multi-dimensional perception and mobility, possesses autonomous decision-making capabilities, adapts to multiple scenarios, and enables efficient intelligent interaction and collaborative operations.



Please fill out the form below. Our expert advisor will contact you shortly!
Integrates multi-dimensional perception and mobility, possesses autonomous decision-making capabilities, adapts to multiple scenarios, and enables efficient intelligent interaction and collaborative operations.





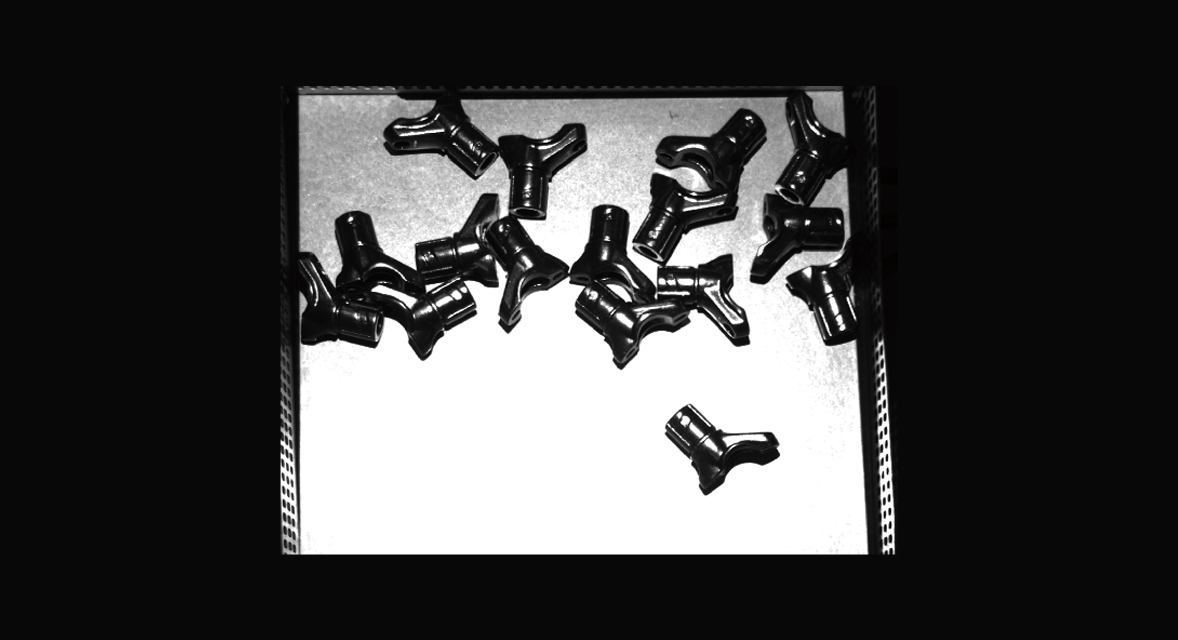
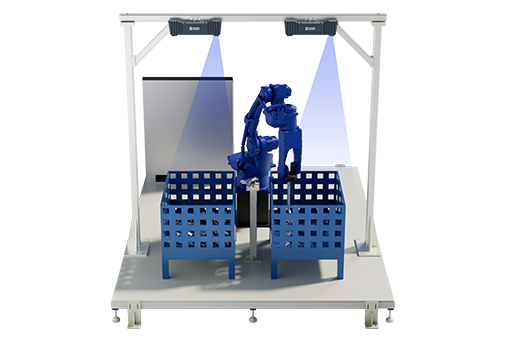
Black Parts
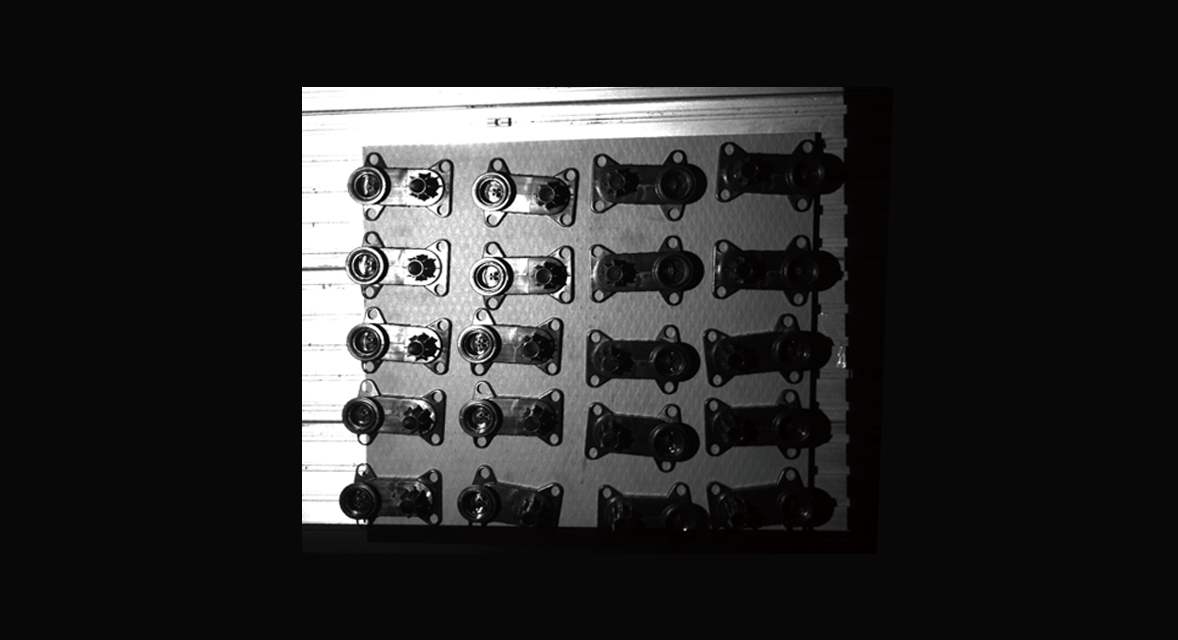
Coffee Machine Parts
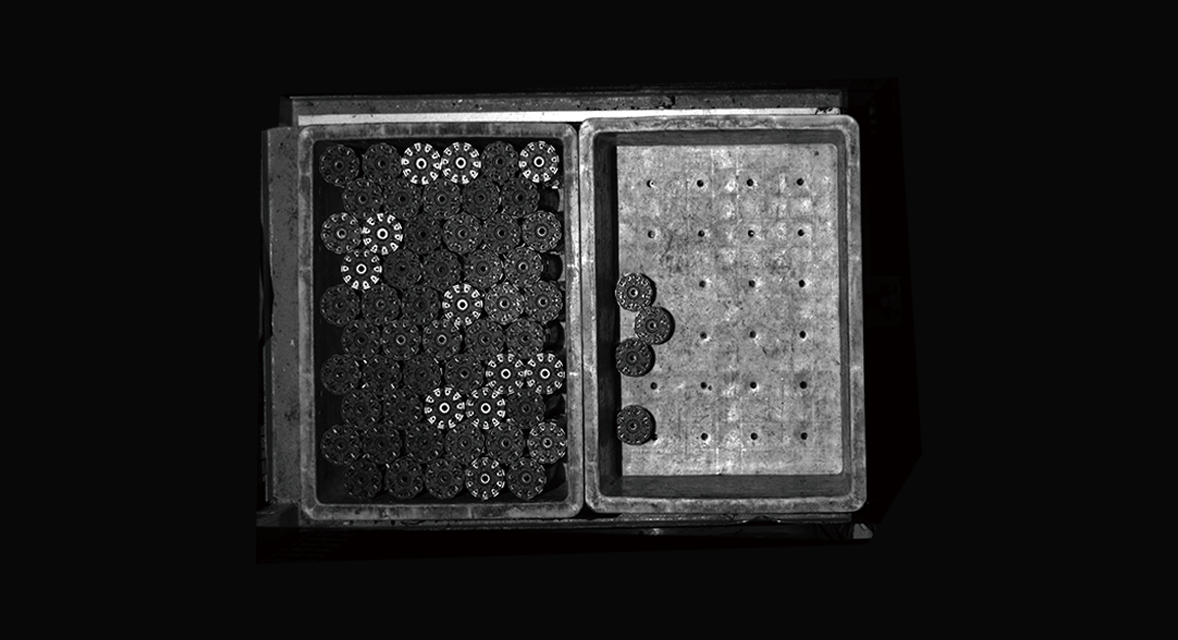
Stacked Rotors
Bicycle Parts
| Mobile Manipulator | DEXOne | DEXOnePlus | |
| Dimensions (mm) | 800×560×800 | 1000×700×800 | |
| Rotation Diameter (mm) | 840 | 1040 | |
| Chassis Ground Clearance (mm) | 25 | 25 | |
| Weight (kg) - Including Battery | 120 | 240 | |
| Battery | 48V/100Ah Ternary Lithium | 48V/100Ah Ternary Lithium | |
| Payload | Robot Payload(kg) | 3-8 | 3-20 |
| Manipulator Payload (kg) | 150 | 300 | |
| Operation Accuracy (mm) | ±0.03 | ||
| Navigation Position Accuracy (mm) | ±5 | ||
| Navigation Angle Precision (mm) | ±0.5 | ||
| End-effector Positioning Method | 2D/3D Vision Positioning | ||
| Moving direction | Forward, Reverse, Turn | ||
| Minimum Passage Width (mm) | 700 | 840 | |
| Navigation Mode | Laser Navigation | ||
| Navigation Speed (m/s) | ≤1.4 | ||
| Integrated Endurance (Hours) | 12 | ||
| Charging Time | ≤2h | ≤2.5h | |
| Charging Methold | Manual/Automatic/Quick Swap | ||
Communication Protocol | WiFi: Dual-band wireless AC/G/N/B Bluetooth: 4.0 LE, Range 10-20m I/O: USB or Ethernet | ||



Contact Us
Headquarters: 14th Floor, Shenzhen Innovation Investment Mansion, No. 1001 Keyuan Road, Nanshan District, Shenzhen City, Guangdong Province, China
Official Hotline: (+86) 4008086299
Official Email: contact@dexforce.com
Career: HR@dexforce.top
Investment: ir@dexforce.com









Copyright © 2025 DexForce Technology Co., Ltd. Guangdong ICP License No. 20058782-4

