






Please fill out the form below. Our expert advisor will contact you shortly!
Cancel
Submit

Please fill out the form below. Our expert advisor will contact you shortly!

A cutting edge 3D sensor that overcomes common challenges like direct sunlight, high reflectivity, and transparent objects.
KINGFISHER


KINGFISHER-W-3003
KINGFISHER-S-601

Excels in challenging lighting conditions, from indoor environments to semi-outdoor settings with strong sunlight, ensuring system stability.

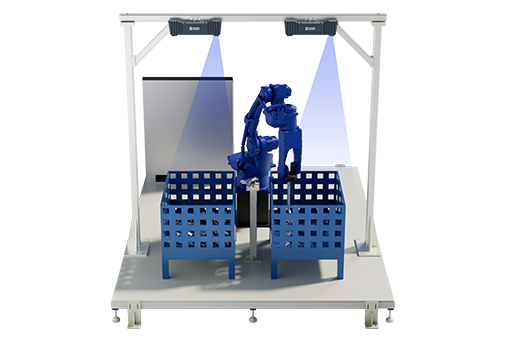
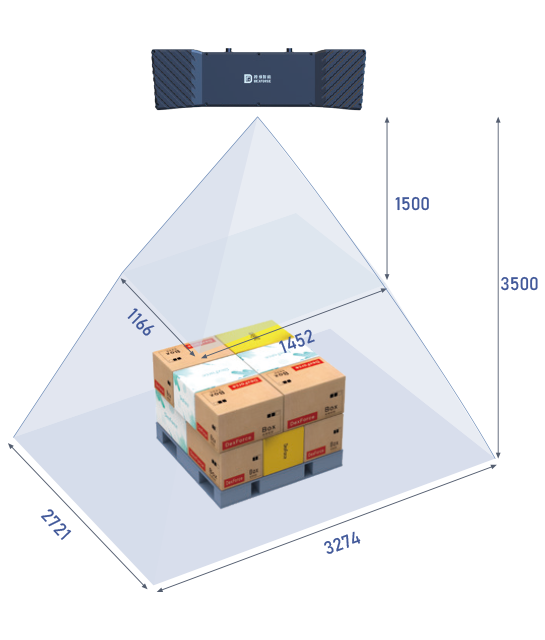
Designed for large field-of-view applications like palletizing and depalletizing, offering a cost-effective, high-performance alternative to traditional 3D cameras.

Supports one-click connection to PickWiz 3D vision software and the DexVerse™ engine for continuous, cloud-based algorithm optimization.
Excels in challenging lighting conditions, from indoor environments to semi-outdoor settings with strong sunlight, ensuring system stability.
Designed for large field-of-view applications like palletizing and depalletizing, offering a cost-effective, high-performance alternative to traditional 3D cameras.
Supports one-click connection to PickWiz 3D vision software and the DexVerse™ engine for continuous, cloud-based algorithm optimization.
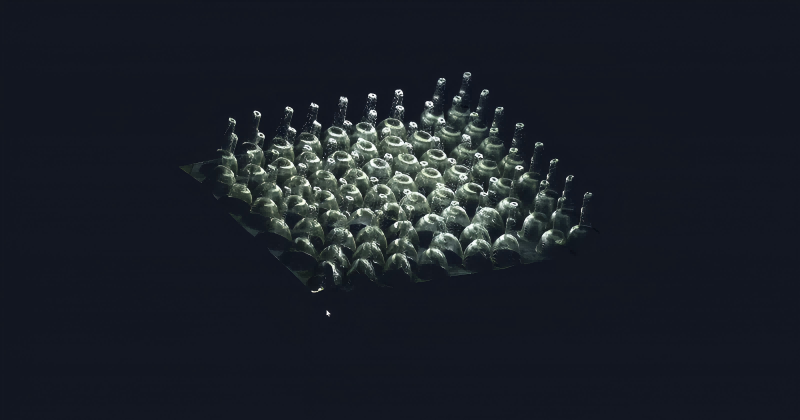
Metal pipes
Components
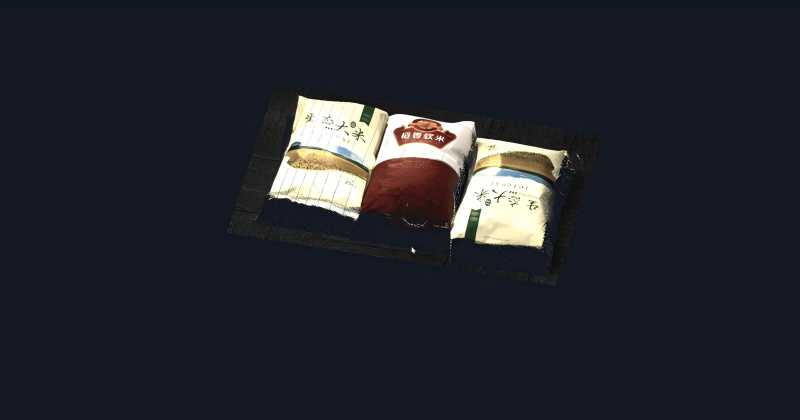
Sacks
Outer Races
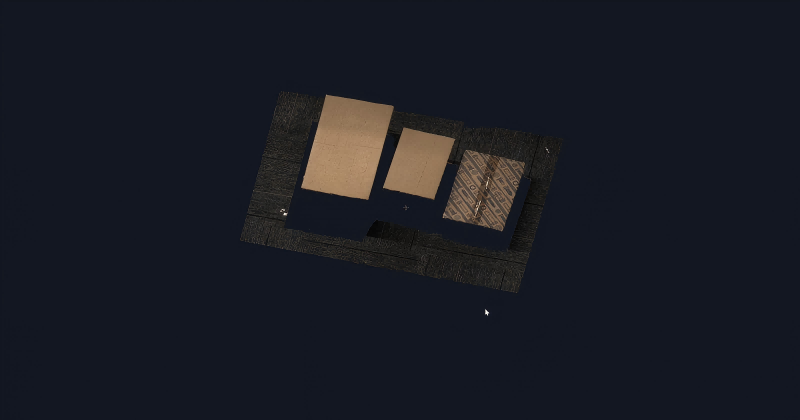
Cartons
| Product Picture |
|  | |
| Model | KINGFISHER-W-3003 | KINGFISHER-S-601 | |
Technical Parameters | Technology Principle | Al Binocular Stereo Matching Algorithm | Al Binocular Stereo Matching Algorithm |
| Light Source | Ambient Light | Ambient Light | |
| Baseline (mm) | 400 | 60 | |
| Weight (kg) | 1.5 | 1.1 | |
| Dimensions (mm) | 457×129×48 | 155×145×60 | |
Power Supply | POE | POE | |
| Interface | GigE | GigE | |
| Field Angle (H/V) | 50°/43° (H/V) | 46°/42° (H/V) | |
| Resolution (px) | 1280×1024 | 1280×1024 | |
Recommended Working Distance (mm) | 1500-3500 | 200-500 | |
| IP Rating | IP65 | IP65 | |
| Measurement Parameters | Near FOV (mm) | 1452×1166 | 135×157 |
| FarFOV(mm) | 3274×2721 | 433×393 | |
| Repeatability(um) | 272 | 136 | |
| XY Axis ACCURACY | 1.13mm@1.5m 2.56mm@3.5m | 0.14mm@0.2m 0.35mm@0.5m | |
Typical Acqusition Time | 1s | 1s | |
Software Parameters | Operating System | Windows 11/Linux | Windows 11/Linux |
| Output Image | Color Image, Depth Map Point Cloud | Color Image, Depth Map, Point Cloud | |
| Cetification | CE/FCC/RoHS/KC | CE/FCC/RoHS/KC | |
| SDK API | C/C++/C#/python/HALCON | C/C++/C#/python/HALCON | |
Contact Us
Headquarters: 14th Floor, Shenzhen Innovation Investment Mansion, No. 1001 Keyuan Road, Nanshan District, Shenzhen City, Guangdong Province, China
Official Hotline: (+86) 4008086299
Official Email: contact@dexforce.com
Career: HR@dexforce.top
Investment: ir@dexforce.com









Copyright © 2025 DexForce Technology Co., Ltd. Guangdong ICP License No. 20058782-4



